Curved mirrors
There are many different types of curved mirrors but we will
consider only spherical and parabolic minors here since they are the most
common.
Uses of curved mirrors
Concave
mirrorsReflecting telescopes
Dental mirrors
Headlamp reflectors
Shaving
and make up mirrors
Searchlight
Projector
Spherical mirrors and the Cassegrain
telescope
Convex mirrorsSafety mirror on dangerous comers
Security
mirrors on buses
Anti shoplifting mirrors
Car wing mirrors
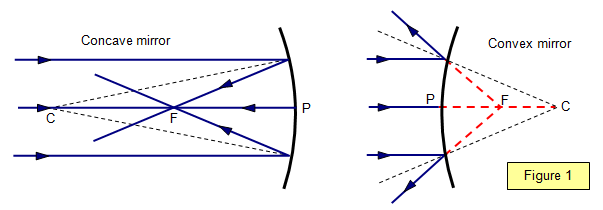
The
effects of a concave and a convex surface on a narrow parallel beam of light are shown in the
following diagrams.
Some
important definitions
The principal axis of a mirror is a line through the centre of the
mirror which passes through its centre of curvature
The pole of the mirror is where the
principal axis meets the minor
The centre of curvature of a mirror is the centre of curvature
of the mirror surface
The radius of curvature of a mirror is the radius of this surface and the
distance from the pole of the mirror (P) to the centre of curvature (C).
The principal focus (F)
is the point where parallel light close to the axis of the mirror is brought to a focus. The focal
length (f) is the distance from the principal focus to the pole of the
mirror.
Sign convention
Adopting a sign convention means
that we decide to give a positive or a negative value to all measurements of
length.
In
this text we will take all real distance as positive and all virtual distances as
negative.
Therefore we should point out the following:
(a) for a concave mirror the
radius of curvature, the principal focus and the focal length are real
(b) for a convex mirror
the radius of curvature, the principal focus and the focal length are virtual
Images
in concave and convex spherical mirrors
Let the object distance be u the image
distance v and the focal length f. A summary of the results for the image positions for a range of
different real object distances in given in the following table.
| |
|
Concave |
|
|
Convex |
|
| Object distance |
|
Image type |
Image distance |
|
Image type |
Image distance |
| > u >2f |
|
real/inverted |
f < v <2f |
|
virtual/erect |
f > v > 2f/3 |
| u = 2f |
|
real/inverted |
v = 2f |
|
virtual/erect |
v = 2f/3 |
| 2f > u > f |
|
real/inverted |
infinity > v > 2f |
|
virtual/erect |
2f/3 > v > f/2 |
| u = f |
|
real/inverted |
v = infinity |
|
virtual/erect |
v = f/2 |
| f > u > 0 |
|
virtual/erect |
infinity > v > 0 |
|
virtual/erect |
f/2 > v > 0 |
| u = infinity |
|
real/inverted |
infinity > v > 2f |
|
rvirtual/erect |
v = f |
A VERSION IN WORD IS AVAILABLE ON THE SCHOOLPHYSICS USB